
Page 12 - Journal of WALS
P. 12
Meenakshi Jain
7. The deep trendelenburg worried me and my e. While it is true in my opinion that side docking is more
anesthesiologists. advantageous over between-the-leg docking, it should
8. It seemed as though too much time was being wasted still be noted that side docking involves a process of
in the turnover time and preparation for a robotic case. positioning the robot at a very particular angle falling
9. The DaVinci technique of port placement made me on the judgment of two different perspectives. The
have both graspers in my left hand and scissors in the perspective of the person moving the robot and the
right hand. I felt as though I was not utilizing my fourth perspective of the person directing the robot. That may
arm adequately. A couple of times I felt as though my sometimes lengthens the time it takes to dock the robot.
scissors had drifted from my field of vision. Even after a dock position is set, it may require more
10. My case volume was decreasing because both the than a few attempts before final docking occurs.
duration of the case and the turnover time between
cases was increasing. Benefits of Parallel Docking
In the last about 300 cases I have done parallel docking.
MY AHA! MOMENT... IT EXISTS!!!
Prior to that we were using side docking.
By the 25th case, my staff and I were finally starting to get 1. It takes on an average half a minute to bring the robot to
comfortable. Then 1 day I made a few changes to my the correct spot and perhaps another minute to dock.
docking technique, changed the port placement and the Add a couple minutes to get the camera and instruments
instrument selection, and that day was my AHA moment. ready and from the time I have put in the ports to the
That day the Jain technique started and there has been no time I start the case it takes me less than 3 to 4 minutes.
looking back. 2. We need only one person moving the robot. It is no
The benefits of the Jain technique are as follows: different than parking your car. As long as the robot is
1. Cases are not only easier but also much faster, even parallel to the base of the operating room table with the
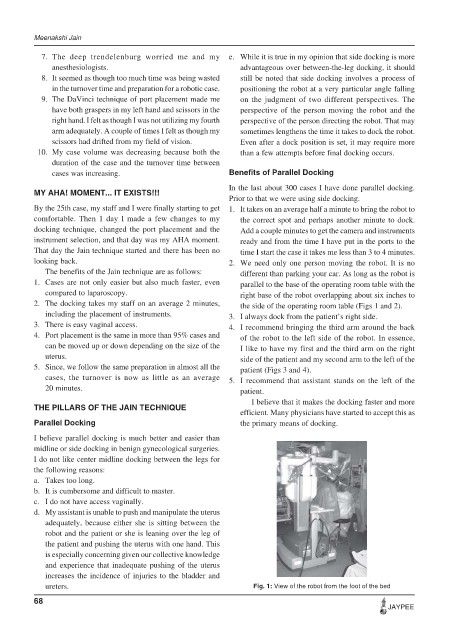
compared to laparoscopy. right base of the robot overlapping about six inches to
2. The docking takes my staff on an average 2 minutes, the side of the operating room table (Figs 1 and 2).
including the placement of instruments. 3. I always dock from the patient’s right side.
3. There is easy vaginal access. 4. I recommend bringing the third arm around the back
4. Port placement is the same in more than 95% cases and of the robot to the left side of the robot. In essence,
can be moved up or down depending on the size of the I like to have my first and the third arm on the right
uterus. side of the patient and my second arm to the left of the
5. Since, we follow the same preparation in almost all the patient (Figs 3 and 4).
cases, the turnover is now as little as an average 5. I recommend that assistant stands on the left of the
20 minutes. patient.
I believe that it makes the docking faster and more
THE PILLARS OF THE JAIN TECHNIQUE
efficient. Many physicians have started to accept this as
Parallel Docking the primary means of docking.
I believe parallel docking is much better and easier than
midline or side docking in benign gynecological surgeries.
I do not like center midline docking between the legs for
the following reasons:
a. Takes too long.
b. It is cumbersome and difficult to master.
c. I do not have access vaginally.
d. My assistant is unable to push and manipulate the uterus
adequately, because either she is sitting between the
robot and the patient or she is leaning over the leg of
the patient and pushing the uterus with one hand. This
is especially concerning given our collective knowledge
and experience that inadequate pushing of the uterus
increases the incidence of injuries to the bladder and
ureters. Fig. 1: View of the robot from the foot of the bed
68
JAYPEE