
Page 8 - Journal of Laparoscopic Surgery
P. 8
Muhammad Nurhadi Rahman, RK Mishra
robots. These robots are an intermediate class between the
‘precise path systems’ surgical robots and the ‘master-slave’
device. They substitute the surgical assistant to perform tasks
that require dexterity without tiring. 9
Most of the camera-holding robotic devices have the
advantages, such as elimination of the fatigue of the assistant
who holds the camera, elimination of fine motor tremor and
small inaccurate movements, delivery of a steady and tremor-
free image, nondependency on camera operator, reduced cost
of surgery and reduced number of highly skilled staff. 4
Some of them have additional advantages and
disadvantages depend on their uniqueness. There are
mechanical, nonrobotic table-mounted clamps, but these require
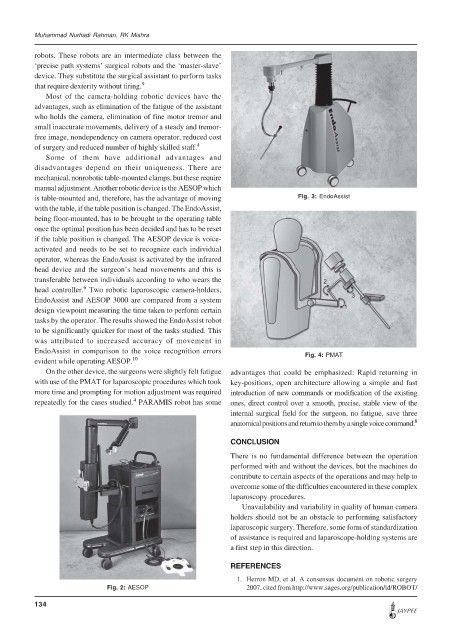
manual adjustment. Another robotic device is the AESOP which
is table-mounted and, therefore, has the advantage of moving Fig. 3: EndoAssist
with the table, if the table position is changed. The EndoAssist,
being floor-mounted, has to be brought to the operating table
once the optimal position has been decided and has to be reset
if the table position is changed. The AESOP device is voice-
activated and needs to be set to recognize each individual
operator, whereas the EndoAssist is activated by the infrared
head device and the surgeon’s head movements and this is
transferable between individuals according to who wears the
6
head controller. Two robotic laparoscopic camera-holders,
EndoAssist and AESOP 3000 are compared from a system
design viewpoint measuring the time taken to perform certain
tasks by the operator. The results showed the EndoAssist robot
to be significantly quicker for most of the tasks studied. This
was attributed to increased accuracy of movement in
EndoAssist in comparison to the voice recognition errors Fig. 4: PMAT
evident while operating AESOP. 10
On the other device, the surgeons were slightly felt fatigue advantages that could be emphasized: Rapid returning in
with use of the PMAT for laparoscopic procedures which took key-positions, open architecture allowing a simple and fast
more time and prompting for motion adjustment was required introduction of new commands or modification of the existing
4
repeatedly for the cases studied. PARAMIS robot has some ones, direct control over a smooth, precise, stable view of the
internal surgical field for the surgeon, no fatigue, save three
anatomical positions and return to them by a single voice command. 8
CONCLUSION
There is no fundamental difference between the operation
performed with and without the devices, but the machines do
contribute to certain aspects of the operations and may help to
overcome some of the difficulties encountered in these complex
laparoscopy procedures.
Unavailability and variability in quality of human camera
holders should not be an obstacle to performing satisfactory
laparoscopic surgery. Therefore, some form of standardization
of assistance is required and laparoscope-holding systems are
a first step in this direction.
REFERENCES
1. Herron MD, et al. A consensus document on robotic surgery
Fig. 2: AESOP 2007, cited from http://www.sages.org/publication/id/ROBOT/
134
JAYPEE