
Page 4 - WALS Journal
P. 4
RK Mishra et al
In this study, we describe our experience with laparoscopic
techniques using a PMAT camera holder.
Materials and Methods
To manipulate the laparoscope along with the visual perception,
this mechatronic assistant with three degrees of freedom was
used (Fig. 1). This mechatronic device is made of aluminum and
weighs 2.5 kg, including laparoscope and camera. This system
consists of a harness (Fig. 2A) that is placed over the surgeon’s
shoulders.
A B C D
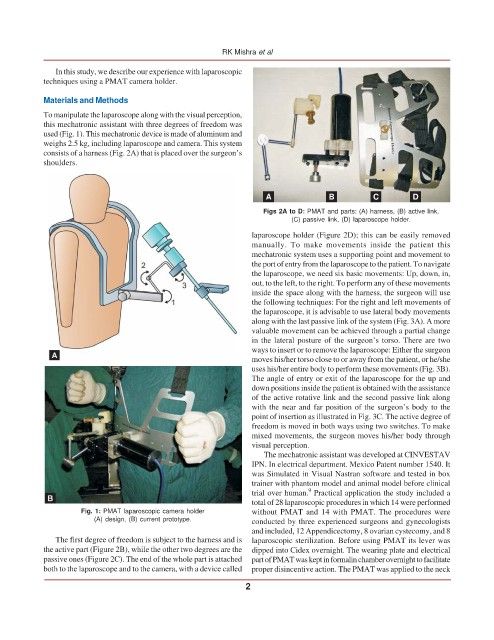
Figs 2A to D: PMAT and parts: (A) harness, (B) active link,
(C) passive link, (D) laparoscope holder.
laparoscope holder (Figure 2D); this can be easily removed
manually. To make movements inside the patient this
mechatronic system uses a supporting point and movement to
the port of entry from the laparoscope to the patient. To navigate
the laparoscope, we need six basic movements: Up, down, in,
out, to the left, to the right. To perform any of these movements
inside the space along with the harness, the surgeon will use
the following techniques: For the right and left movements of
the laparoscope, it is advisable to use lateral body movements
along with the last passive link of the system (Fig. 3A). A more
valuable movement can be achieved through a partial change
in the lateral posture of the surgeon’s torso. There are two
ways to insert or to remove the laparoscope: Either the surgeon
moves his/her torso close to or away from the patient, or he/she
uses his/her entire body to perform these movements (Fig. 3B).
The angle of entry or exit of the laparoscope for the up and
down positions inside the patient is obtained with the assistance
of the active rotative link and the second passive link along
with the near and far position of the surgeon’s body to the
point of insertion as illustrated in Fig. 3C. The active degree of
freedom is moved in both ways using two switches. To make
mixed movements, the surgeon moves his/her body through
visual perception.
The mechatronic assistant was developed at CINVESTAV
IPN. In electrical department. Mexico Patent number 1540. It
was Simulated in Visual Nastran software and tested in box
trainer with phantom model and animal model before clinical
9
trial over human. Practical application the study included a
total of 28 laparoscopic procedures in which 14 were performed
Fig. 1: PMAT laparoscopic camera holder without PMAT and 14 with PMAT. The procedures were
(A) design, (B) current prototype. conducted by three experienced surgeons and gynecologists
and included, 12 Appendicectomy, 8 ovarian cystecomy, and 8
The first degree of freedom is subject to the harness and is laparoscopic sterilization. Before using PMAT its lever was
the active part (Figure 2B), while the other two degrees are the dipped into Cidex overnight. The wearing plate and electrical
passive ones (Figure 2C). The end of the whole part is attached part of PMAT was kept in formalin chamber overnight to facilitate
both to the laparoscope and to the camera, with a device called proper disincentive action. The PMAT was applied to the neck
2