Minimal Access Robotic Surgery
On July 11, 2000, FDA approved the first completely robotic surgery device, the da Vinci surgical system from Intuitive Surgical (Mountain View, CA). The system enables surgeons to remove gallbladders and perform other general surgical procedures while seated at a computer console and 3D video imaging system across the room from the patient. The surgeons operate controls with their hands and fingers to direct a robotically controlled laparoscope.

This system and other robotic devices developed or under development by companies such as Computer Motion (Santa Barbara, CA) and Integrated Surgical Systems (Davis, CA) have the potential to revolutionize surgery and the operating room. They provide surgeons with the precision and dexterity necessary to perform complex, minimally invasive surgical (MIS) procedures, such as beating-heart single- or double-vessel bypass and neurological, orthopedic, and plastic surgery, among many other future applications. Manufacturers believe that their products will broaden the scope and increase the effectiveness of MIS; improve patient outcomes; and create a safer, more efficient, and more cost-effective operating room. It is the vision of these companies that robotic systems will one day be applicable to all surgical specialties, although it is too early to tell the full extent to which they’ll be used.
The first generation of surgical robots are already being installed in a number of operating rooms around the world. These are not true autonomous robots that can perform surgical tasks on their own, but they are lending a mechanical helping hand to surgeons. These machines still require a human surgeon to operate them and input instructions. Remote control and voice activation are the methods by which these surgical robots are controlled. Robotics are being introduced to minimal access surgery because they allow for unprecedented control and precision of surgical instruments. So far, these machines have been used to position an endoscope, perform gallbladder surgery and correct gastroesophgeal reflux and heartburn. The ultimate goal of the robotic surgery field is to design a robot that can be used to perform closed-chest, beating-heart surgery.
Recently transatlantic surgery between USA and Strasbourg is a revolution in transatlantic minimal access surgery. In this surgery there was slight delay (66 millisecond) delay in transfer of data but in future this delay can easily minimized. In the future remote handling technology will overcome the manipulative restriction in the current instruments. There is no doubt 10 years from now some surgeons will be operating exclusively via a computer interface controlling a masterslave manipulation. If computer-controlled machinery can mimic the awareness, adaptability and knowledge of a human surgeon, such a takeover in the operating theater is actually realistic.
In the operating room of the future, physicians will use tiny high-tech tools to travel inside the body with dexterity and precision beyond imagining. The future of any new technology depends up on the training.
Three surgical robots that have been recently developed are:
• da Vinci surgical system
• ZEUS robotic surgical system
• AESOP robotic system.
The “da Vinci” system has seven degree of freedom movement so it can perform more complex task. The “da Vinci” system has been used to perform a number of general surgical procedures like cholecystectomy and fundoplication. Robotic fundoplication allows easier passage around and behind the esophagus during its dissection and easier mobilization of the curvature of the stomach. Suturing the wrap and the crural approximation are also easier with the help of these robots.
The $1 million da Vinci system consists of two primary components:
• A viewing and control console
• A surgical arm unit.
In using da Vinci for gallbladder surgery, three incisions, no larger than the diameter of a pencil are made in the patient’s abdomen, which allows for three stainless-steel rods to be inserted. The rods are held in place by three robotic arms. One of the rods is equipped with a camera, while the other two are fitted with surgical instruments that are able to dissect and suture the tissue of the gallbladder. Unlike in conventional surgery, these instruments are not directly touched by the doctor’s hands.
Effector tips of the da Vinci surgical system incorporate miniature wrists that allow them to mimic any movement made by the surgeon at the control console. Sitting at the control console, a few feet from the operating table, the surgeon looks into a viewfinder to examine the 3D images being sent by the camera inside the patient. The images show the surgical site and the two surgical instruments mounted on the tips of two of the rods. Joystick-like controls, located just underneath the screen, are used by the surgeon to manipulate the surgical instruments. Each time one of the joysticks is moved, a computer sends an electronic signal to one of the instruments, which moves in sync with the movements of the surgeon’s hands.
Another robotic system is the ZEUS System, made by computer motion, which is already available in Europe. However, both the da Vinci and ZEUS systems must receive governmental approval for each procedure that a surgeon plans to use it for. The $750,000 ZEUS has a similar set up to that of the da Vinci. It has a computer workstation, a video display, and hand controls that are used to move the table-mounted surgical instruments. While the ZEUS system has not yet been cleared for American use beyond clinical trials, German doctors have already used the system to perform coronary bypass surgery.
The ZEUS system employs the assistance of the automated endoscopic system for optimal positioning (AESOP) robotic system. Released by computer motion in 1994, AESOP was the first robot to be cleared by the FDA for assisting surgery in the operating room. AESOP is much simpler than the da Vinci and ZEUS systems. It is basically just one mechanical arm, used by the physician to position the laparoscope. Foot pedals or voice-activated software allow the surgeon to position the camera, leaving his or her hands free to continue operating on the patient. The use of a computer console to perform operations from a distance opens up the idea of telesurgery, which would involve a doctor performing delicate surgery thousands of miles away from the patient. If it were possible to use the computer console to move the robotic arms in real-time, then it would be possible for a doctor in New Delhi to operate on a patient in New York. A major obstacle in telesurgery has been the time delay between the doctor moving his or her hands to the robotic arms responding to those movements. Currently, the doctor must be in the room with the patient for robotic systems to react instantly to the doctor’s hand movements.
Having fewer personnel in the operating room and allowing doctors the ability to operate on a patient long- distance could lower the cost of health care. In addition to cost efficiency, robotic surgery has several other advantages over conventional surgery, including enhanced precision and reduced trauma to the patient. For instance, heart bypass surgery now requires that the patient’s chest 30.48 cm long incision. However, with the da Vinci or ZEUS systems, it is possible to operate on the heart by making three small incisions in the chest, each only 10 mm in diameter. The patient would experience less pain and less bleeding, which means a faster recovery.
Robotics also decreases the fatigue that doctors experience during surgeries that can last several hours. Surgeons can become exhausted during those long surgeries, and can experience hand tremors as a result. Even the steadiest of human hands cannot match those of a surgical robot. The da Vinci system has been programmed to com- pensate for tremors, so if the doctor’s hand shakes the computer ignores it and keeps the mechanical arm steady. While surgical robots offer some advantages over the human hand, we are still a long way from the day when autonomous robots will operate on people without human interaction. But, with advances in computer power and artificial intelligence, it could be that in this century a robot will be designed that can locate abnormalities in the human body, analyze them and operate to correct those abnormalities without any human guidance.
The fallopian tube reconnection procedure, referred to as tubal reanastomosis, was performed by Dr Tommaso Falcone, who is Head of the Reproductive Endocrinology and Infertility Section at the Cleveland Clinic. Dr Falcone used Computer Motion’s ZEUS robotic surgical system as part of a clinical trial, approved by the United States Food and Drug Administration (FDA).
The patient, a 38-year-old woman, and her healthy 10- day-old son are both in excellent condition and have returned to their Cleveland-area home. The mother had originally undergone a tubal ligation sterilization operation in her twenties. She and her partner later wished to have a child together and began preparing for a reversal operation. The patient saw an advertisement for the ZEUS study and consulted with trial leader Dr Falcone. The lady was informed in detail of the investigational protocol and agreed to have the robotically assisted procedure.
In addition to the ZEUS System, Computer Motion markets the AESOP 3000, a voice-controlled endoscope positioning system, and the HERMES Control Center, a centralized system which enables the surgeon to voice control a network of “smart” medical devices. Currently, the ZEUS system is under an FDA-approved investigational device exemption and is also CE marked for commercial sale in Europe.
Robotics is rapidly developing in surgery, although the word is slightly misused in this connection. None of the systems under development involves a machine acting autonomously. Instead, the machine acts as a remote extension of the surgeon. The correct term for such a system is a “master slave manipulator,” although it seems unlikely that this term will gain general currency.
Minimal invasive surgery is itself a form of tele- manipulation because the surgeon is physically separated from the workspace. Telerobotics is an obvious tool to extend the surgeons capabilities. The goal is to restore the tactile cues and intuitive dexterity of the surgeon, which are diminished by minimal invasive surgery. A slave manipulator, controlled through a spatially consistent and intuitive master with a force feedback system, could replace the tactile sensibilities and restore dexterity.

Although the potential of robotic surgery is just beginning but progress may come quickly. Laparoscopic gallbladder surgery was first done in 1987, but it became standard within five years. Just think about a surgeon! He picks up this black box and waves it over your body, and you’re fixed. How’s that going to happen? One day a surgeon may use robotic devices to enter the body through its own orifices. They could carry medical instruments inside the body, where they would be manipulated by simple computer commands.

The robotic arm after addition of wrists permits the surgeon to mimic his own movements, rather than experience limitations of the rigid long cylindrical laparoscopic instrument and has obvious advantages in terms of dexterity and complexity of the instrument.
On July 11, 2000, FDA approved the first completely robotic surgery device, the da Vinci surgical system from Intuitive Surgical (Mountain View, CA). The system enables surgeons to remove gallbladders and perform other general surgical procedures while seated at a computer console and 3D video imaging system across the room from the patient. The surgeons operate controls with their hands and fingers to direct a robotically controlled laparoscope.
Robotic surgery port placement for nephrectomy
This system and other robotic devices developed or under development by companies such as Computer Motion (Santa Barbara, CA) and Integrated Surgical Systems (Davis, CA) have the potential to revolutionize surgery and the operating room. They provide surgeons with the precision and dexterity necessary to perform complex, minimally invasive surgical (MIS) procedures, such as beating-heart single- or double-vessel bypass and neurological, orthopedic, and plastic surgery, among many other future applications. Manufacturers believe that their products will broaden the scope and increase the effectiveness of MIS; improve patient outcomes; and create a safer, more efficient, and more cost-effective operating room. It is the vision of these companies that robotic systems will one day be applicable to all surgical specialties, although it is too early to tell the full extent to which they’ll be used.
The first generation of surgical robots are already being installed in a number of operating rooms around the world. These are not true autonomous robots that can perform surgical tasks on their own, but they are lending a mechanical helping hand to surgeons. These machines still require a human surgeon to operate them and input instructions. Remote control and voice activation are the methods by which these surgical robots are controlled. Robotics are being introduced to minimal access surgery because they allow for unprecedented control and precision of surgical instruments. So far, these machines have been used to position an endoscope, perform gallbladder surgery and correct gastroesophgeal reflux and heartburn. The ultimate goal of the robotic surgery field is to design a robot that can be used to perform closed-chest, beating-heart surgery.
Recently transatlantic surgery between USA and Strasbourg is a revolution in transatlantic minimal access surgery. In this surgery there was slight delay (66 millisecond) delay in transfer of data but in future this delay can easily minimized. In the future remote handling technology will overcome the manipulative restriction in the current instruments. There is no doubt 10 years from now some surgeons will be operating exclusively via a computer interface controlling a masterslave manipulation. If computer-controlled machinery can mimic the awareness, adaptability and knowledge of a human surgeon, such a takeover in the operating theater is actually realistic.
In the operating room of the future, physicians will use tiny high-tech tools to travel inside the body with dexterity and precision beyond imagining. The future of any new technology depends up on the training.
Three surgical robots that have been recently developed are:
• da Vinci surgical system
• ZEUS robotic surgical system
• AESOP robotic system.
The “da Vinci” system has seven degree of freedom movement so it can perform more complex task. The “da Vinci” system has been used to perform a number of general surgical procedures like cholecystectomy and fundoplication. Robotic fundoplication allows easier passage around and behind the esophagus during its dissection and easier mobilization of the curvature of the stomach. Suturing the wrap and the crural approximation are also easier with the help of these robots.
The $1 million da Vinci system consists of two primary components:
• A viewing and control console
• A surgical arm unit.
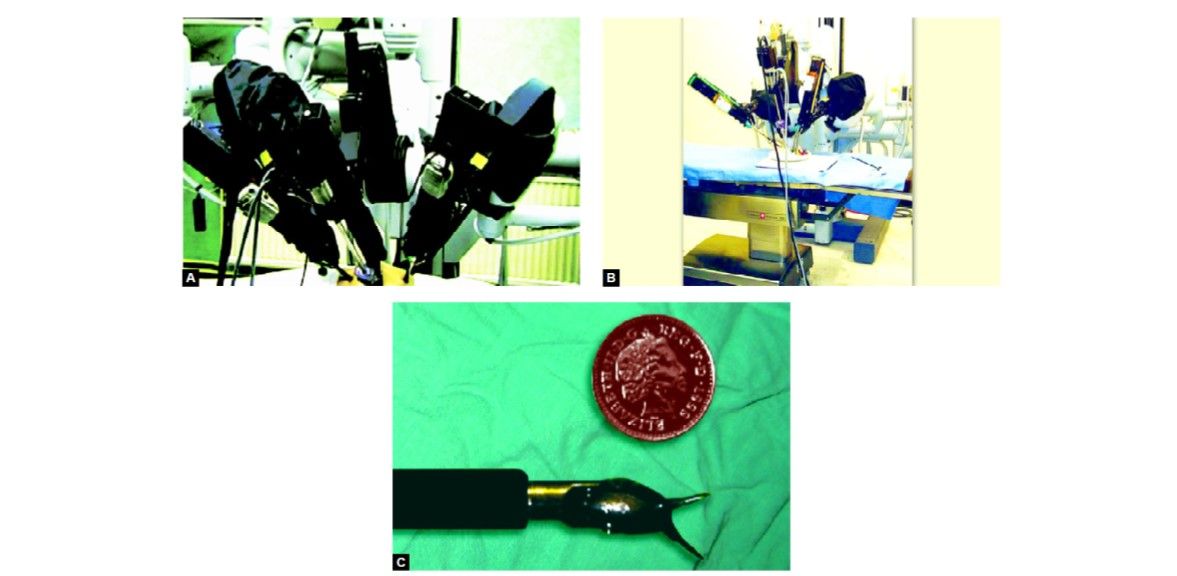
(A and B) Robotic arms of da Vinci surgical system; (C) Effector tips of the da Vinci surgical system
In using da Vinci for gallbladder surgery, three incisions, no larger than the diameter of a pencil are made in the patient’s abdomen, which allows for three stainless-steel rods to be inserted. The rods are held in place by three robotic arms. One of the rods is equipped with a camera, while the other two are fitted with surgical instruments that are able to dissect and suture the tissue of the gallbladder. Unlike in conventional surgery, these instruments are not directly touched by the doctor’s hands.
Effector tips of the da Vinci surgical system incorporate miniature wrists that allow them to mimic any movement made by the surgeon at the control console. Sitting at the control console, a few feet from the operating table, the surgeon looks into a viewfinder to examine the 3D images being sent by the camera inside the patient. The images show the surgical site and the two surgical instruments mounted on the tips of two of the rods. Joystick-like controls, located just underneath the screen, are used by the surgeon to manipulate the surgical instruments. Each time one of the joysticks is moved, a computer sends an electronic signal to one of the instruments, which moves in sync with the movements of the surgeon’s hands.
Another robotic system is the ZEUS System, made by computer motion, which is already available in Europe. However, both the da Vinci and ZEUS systems must receive governmental approval for each procedure that a surgeon plans to use it for. The $750,000 ZEUS has a similar set up to that of the da Vinci. It has a computer workstation, a video display, and hand controls that are used to move the table-mounted surgical instruments. While the ZEUS system has not yet been cleared for American use beyond clinical trials, German doctors have already used the system to perform coronary bypass surgery.
The ZEUS system employs the assistance of the automated endoscopic system for optimal positioning (AESOP) robotic system. Released by computer motion in 1994, AESOP was the first robot to be cleared by the FDA for assisting surgery in the operating room. AESOP is much simpler than the da Vinci and ZEUS systems. It is basically just one mechanical arm, used by the physician to position the laparoscope. Foot pedals or voice-activated software allow the surgeon to position the camera, leaving his or her hands free to continue operating on the patient. The use of a computer console to perform operations from a distance opens up the idea of telesurgery, which would involve a doctor performing delicate surgery thousands of miles away from the patient. If it were possible to use the computer console to move the robotic arms in real-time, then it would be possible for a doctor in New Delhi to operate on a patient in New York. A major obstacle in telesurgery has been the time delay between the doctor moving his or her hands to the robotic arms responding to those movements. Currently, the doctor must be in the room with the patient for robotic systems to react instantly to the doctor’s hand movements.
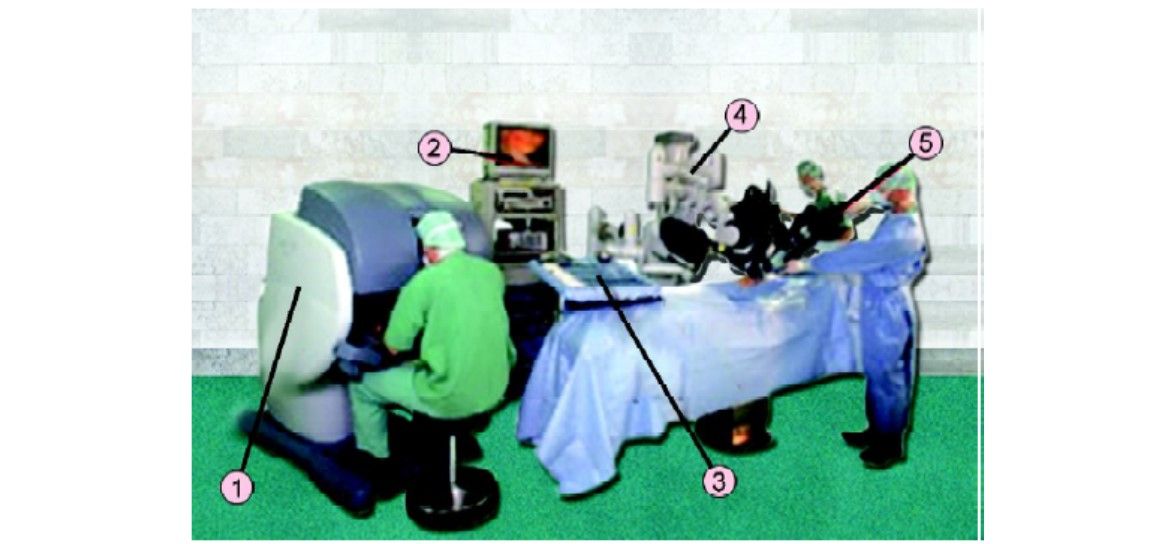
Robotic surgery (1) Surgeon console; (2) Image processing equipment; (3) Endowrist instruments; (4) Surgical arm cart; (5) Hi-resolution 3D endoscope
Having fewer personnel in the operating room and allowing doctors the ability to operate on a patient long- distance could lower the cost of health care. In addition to cost efficiency, robotic surgery has several other advantages over conventional surgery, including enhanced precision and reduced trauma to the patient. For instance, heart bypass surgery now requires that the patient’s chest 30.48 cm long incision. However, with the da Vinci or ZEUS systems, it is possible to operate on the heart by making three small incisions in the chest, each only 10 mm in diameter. The patient would experience less pain and less bleeding, which means a faster recovery.
Robotics also decreases the fatigue that doctors experience during surgeries that can last several hours. Surgeons can become exhausted during those long surgeries, and can experience hand tremors as a result. Even the steadiest of human hands cannot match those of a surgical robot. The da Vinci system has been programmed to com- pensate for tremors, so if the doctor’s hand shakes the computer ignores it and keeps the mechanical arm steady. While surgical robots offer some advantages over the human hand, we are still a long way from the day when autonomous robots will operate on people without human interaction. But, with advances in computer power and artificial intelligence, it could be that in this century a robot will be designed that can locate abnormalities in the human body, analyze them and operate to correct those abnormalities without any human guidance.
The fallopian tube reconnection procedure, referred to as tubal reanastomosis, was performed by Dr Tommaso Falcone, who is Head of the Reproductive Endocrinology and Infertility Section at the Cleveland Clinic. Dr Falcone used Computer Motion’s ZEUS robotic surgical system as part of a clinical trial, approved by the United States Food and Drug Administration (FDA).
The patient, a 38-year-old woman, and her healthy 10- day-old son are both in excellent condition and have returned to their Cleveland-area home. The mother had originally undergone a tubal ligation sterilization operation in her twenties. She and her partner later wished to have a child together and began preparing for a reversal operation. The patient saw an advertisement for the ZEUS study and consulted with trial leader Dr Falcone. The lady was informed in detail of the investigational protocol and agreed to have the robotically assisted procedure.
In addition to the ZEUS System, Computer Motion markets the AESOP 3000, a voice-controlled endoscope positioning system, and the HERMES Control Center, a centralized system which enables the surgeon to voice control a network of “smart” medical devices. Currently, the ZEUS system is under an FDA-approved investigational device exemption and is also CE marked for commercial sale in Europe.
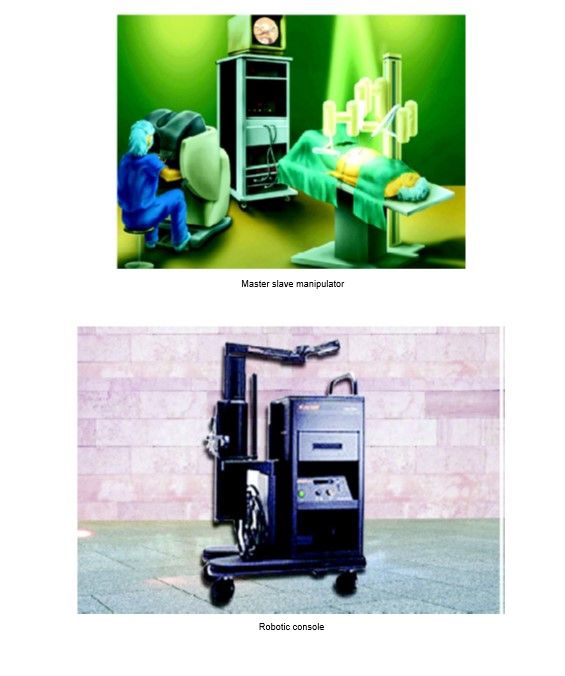
Robotics is rapidly developing in surgery, although the word is slightly misused in this connection. None of the systems under development involves a machine acting autonomously. Instead, the machine acts as a remote extension of the surgeon. The correct term for such a system is a “master slave manipulator,” although it seems unlikely that this term will gain general currency.
Minimal invasive surgery is itself a form of tele- manipulation because the surgeon is physically separated from the workspace. Telerobotics is an obvious tool to extend the surgeons capabilities. The goal is to restore the tactile cues and intuitive dexterity of the surgeon, which are diminished by minimal invasive surgery. A slave manipulator, controlled through a spatially consistent and intuitive master with a force feedback system, could replace the tactile sensibilities and restore dexterity.
Robotic surgery via master slave manipulator
Although the potential of robotic surgery is just beginning but progress may come quickly. Laparoscopic gallbladder surgery was first done in 1987, but it became standard within five years. Just think about a surgeon! He picks up this black box and waves it over your body, and you’re fixed. How’s that going to happen? One day a surgeon may use robotic devices to enter the body through its own orifices. They could carry medical instruments inside the body, where they would be manipulated by simple computer commands.
Robotic Arm
The robotic arm after addition of wrists permits the surgeon to mimic his own movements, rather than experience limitations of the rigid long cylindrical laparoscopic instrument and has obvious advantages in terms of dexterity and complexity of the instrument.
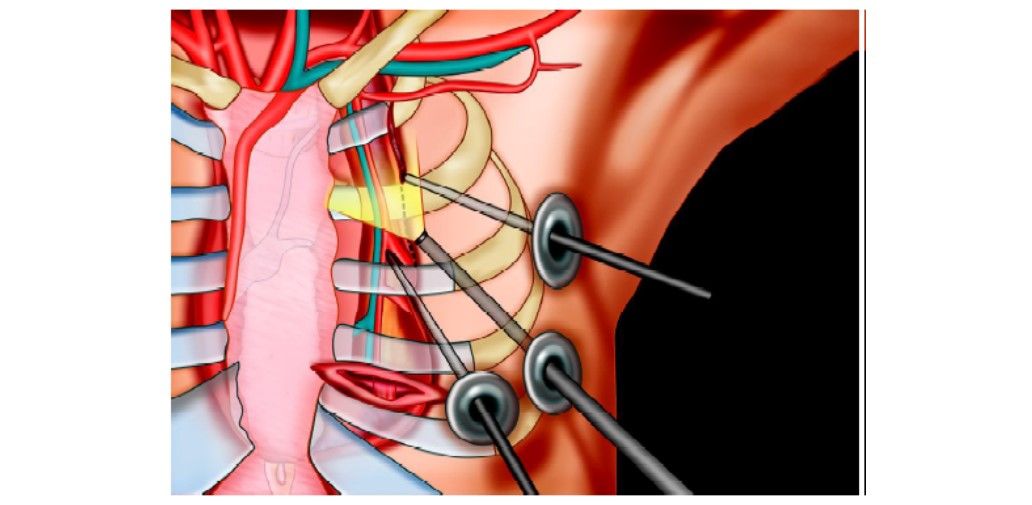
Ports in cardiac minimal access surgery